Due Motor Shield Example
This example shows how to drive a DC motor in forward and backward directions, using the Arduino Due and Motor Shield.
Hardware Required
- Arduino Due
- Arduino Motor Shield
- DC motor
- Wall wart power supply
Circuit
To build the circuit you need to mount the Arduino Motor Shield on top of the Arduino Due. Then you have to connect the two wires that comes out of the DC motor to the screw drivers terminals of the Motor Shield channel A. Last thing connect your wall wart power supply adapter to the DC connector of the Arduino Due. You must choose it respecting the voltage requirements of your DC motor. With the fan that we used in this example we provided 12V to the board.
Then plug your Arduino board into your computer, start the Arduino IDE 1.5, and enter the code below.
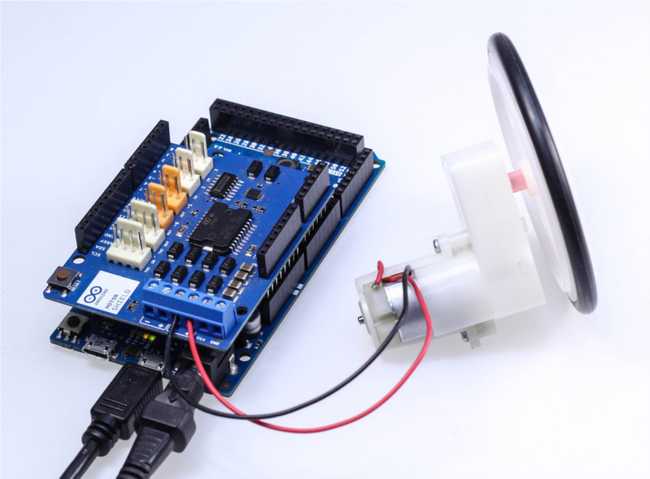
Arduino Due, Motor Shield and fan connected together.
Code
1const int2PWM_A = 3,3DIR_A = 12,4BRAKE_A = 9,5SNS_A = A0;6
7
8void setup() {9 // Configure the A output10 pinMode(BRAKE_A, OUTPUT); // Brake pin on channel A11 pinMode(DIR_A, OUTPUT); // Direction pin on channel A12
13 // Open Serial communication14 Serial.begin(9600);15 Serial.println("Motor shield DC motor Test:\n");16}17
18void loop() {19
20// Set the outputs to run the motor forward21
22 digitalWrite(BRAKE_A, LOW); // setting brake LOW disable motor brake23 digitalWrite(DIR_A, HIGH); // setting direction to HIGH the motor will spin forward24
25 analogWrite(PWM_A, 255); // Set the speed of the motor, 255 is the maximum value26
27 delay(5000); // hold the motor at full speed for 5 seconds28 Serial.print("current consumption at full speed: ");29 Serial.println(analogRead(SNS_A));30
31// Brake the motor32
33 Serial.println("Start braking\n");34 // raising the brake pin the motor will stop faster than the stop by inertia35 digitalWrite(BRAKE_A, HIGH); // raise the brake36 delay(5000);37
38// Set the outputs to run the motor backward39
40 Serial.println("Backward");41 digitalWrite(BRAKE_A, LOW); // setting againg the brake LOW to disable motor brake42 digitalWrite(DIR_A, LOW); // now change the direction to backward setting LOW the DIR_A pin43
44 analogWrite(PWM_A, 255); // Set the speed of the motor45
46 delay(5000);47 Serial.print("current consumption backward: ");48 Serial.println(analogRead(SNS_A));49
50 // now stop the motor by inertia, the motor will stop slower than with the brake function51 analogWrite(PWM_A, 0); // turn off power to the motor52
53 Serial.print("current brake: ");54 Serial.println(analogRead(A0));55 Serial.println("End of the motor shield test with DC motors. Thank you!");56
57
58 while(1);59}Suggest changes
The content on docs.arduino.cc is facilitated through a public GitHub repository. If you see anything wrong, you can edit this page here.
License
The Arduino documentation is licensed under the Creative Commons Attribution-Share Alike 4.0 license.